Robotertermiten als Bauhelfer
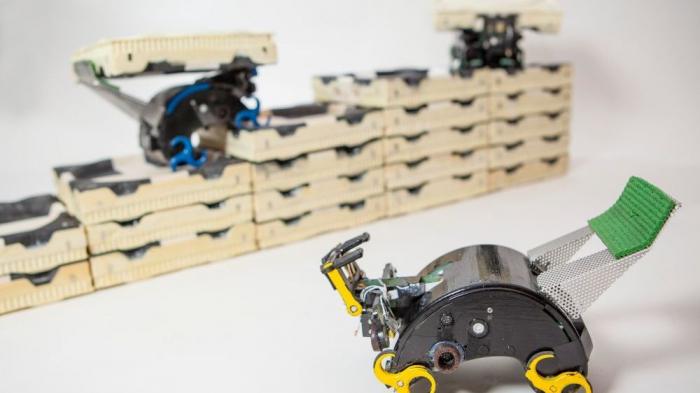
Die TERMES-Roboter können Bauelemente tragen, Treppen bauen und sie erklettern, um neue Bauelemente hinzuzufügen. Sie folgen einfachen Regeln, um ein Bauprojekt unabhängig fertigzustellen. Bild: Eliza Grinnell, Harvard SEAS
US-Forscher entwickeln dezentrale Robotersteuerung nach dem Vorbild von Insekten
Wenn es um Forschungsstationen auf anderen Planeten, Solarkraftwerke im Erdorbit oder Weltraumfahrstühle geht, wird zumeist in einem Nebensatz erwähnt, dass solche entlegenen Bauwerke natürlich von Robotern errichtet würden. Wie das im Einzelnen ablaufen soll, ist allerdings noch weitgehend unklar. Gibt es da Robotervorarbeiter, die die einfachen Handlanger antreiben, und einen Roboterarchitekten, der die Baufortschritte überwacht?
Nein, schreiben Justin Werfel, Kirstin Petersen und Radhika Nagpal von der Harvard University in der aktuellen Ausgabe von Science. Die zentral gesteuerte Bauweise habe zwar zweifellos Vorteile hinsichtlich Effizienz und Flexibilität, erfordere aber auch eine entsprechende Infrastruktur, etwa zur Durchführung präziser Vermessungen, die im Weltraum oder auch in Katastrophengebieten auf der Erde nicht ohne weiteres herzustellen ist. Die Forscher favorisieren daher eine dezentrale Vorgehensweise, für die sie sich von Termiten haben inspirieren lassen.
Die Leistungen dieser Insekten als Baumeister sind in der Tat beeindruckend. Obwohl sie nur ihre unmittelbare Umgebung wahrnehmen, gelingen ihnen durch Kooperation äußerst stabile, perfekt klimatisierte Behausungen, die bis zum 500-fachen ihrer Körpergröße aufragen können. Das Verfahren wird als Stigmergie bezeichnet: Die einzelnen Tiere kommunizieren nicht direkt miteinander, sondern indirekt über ihre gemeinsame Umwelt. Ein Klumpen Erdreich etwa, von einer Termite platziert und mit Duftstoffen versehen, zieht andere Termiten an, die weitere Klumpen hinzufügen. Nach und nach entsteht so ohne zentralen Plan ein Wolkenkratzer mit Platz für Millionen Insekten. Die Harvard-Forscher haben nun auf die gleiche Weise die Aktionen von Robotern koordiniert. Dabei nutzten sie bewusst sehr einfache Roboter: Sie können sich vor und zurück bewegen sowie auf der Stelle drehen, nehmen nur ihre unmittelbare Umgebung wahr und können zwischen einem anderen Roboter und einem Baustein unterscheiden. Bausteine können sie aufladen und wieder ablegen und Höhenunterschiede von der Größe eines Steins überwinden. Die Roboter haben kein Gedächtnis und keine Karte ihrer Umgebung, sie wissen nicht, wo sie schon Steine abgelegt haben, sondern reagieren nur nach festgelegten Regeln auf ihre Umwelt.

Um genau diese Regeln geht es: Im Unterschied zu Termiten, bei denen sie sich im Laufe einer langen Evolution herausgebildet haben, haben Werfel, Petersen und Nagpal gezielt Algorithmen entwickelt, abgeleitet aus den Strukturen der Bauwerke, die durch das Zusammenwirken der Roboter entstehen sollen. Dabei ging es zunächst um einfache Strukturen, errichtet mit einheitlichen Standardbausteinen. Das reichte aber aus, um die grundsätzliche Tauglichkeit der dezentral gesteuerten Bauweise zu demonstrieren. Die halten die Forscher insbesondere dann für angeraten, wenn es um die Errichtung von Bauten in Umgebungen geht, die für Menschen schwer zugänglich oder gefährlich sind. Die dezentrale Koordinierung könne beliebig skaliert, also unterschiedlichen Größenordnungen angepasst werden, indem einfach entsprechend mehr oder weniger Roboter eingesetzt werden. Ein weiterer Vorteil sei die hohe Robustheit: Einzelne Bauhelfer können durchaus ausfallen, ohne gleich das gesamte Projekt zu gefährden.
Die Evolutionsbiologin Judith Korb von der Universität Freiburg lobt das Verfahren in einem Kommentar für Science denn auch als "extrem elegantes System" und hebt hervor: "Es erlaubt die autonome Konstruktion beliebiger, genau definierter Strukturen mit einfachen Robotern." Mehr noch: Mit den Algorithmen von Werfel et. al. könnten die Menschen vielleicht sogar den Termiten noch etwas beibringen.
Ob die Insekten künftig in Hügeln wohnen wollen, die wie Miniaturausgaben des Empire State Building oder anderer Wolkenkratzer aussehen, sei mal dahingestellt. Aber die menschlichen Behausungen werden die Roboterbauarbeiter über kurz oder lang gewiss verändern – nicht nur auf fernen Planeten, sondern auch auf der Erde.
So haben die Architekten Fabio Gramazio und Matthias Kohler von der ETH Zürich Pläne für ein "Vertical Village" entwickelt, das im französischen Département Meuse entstehen könnte. Es handelt sich dabei um einen 600 Meter hohen Turm, der aus 15 Meter großen Elementen gebaut werden und 30.000 Bewohnern Platz bieten soll. Ein Modell dieser futuristischen Siedlung konnten sie bereits vor zwei Jahren mithilfe von Quadrokoptern im Maßstab 1:100 errichten. Dabei wurden die Quadrokopter allerdings durch 19 im Raum installierte Motion-Capture-Kameras gesteuert, die die zentimetergenaue Platzierung der Bausteine gewährleisteten. Das dürfte für die Umsetzung in Originalgröße kaum praktikabel sein. Da ist der dezentrale Termitenansatz sicher vielversprechender.